|
第三十八讲 下一讲 学时:2学时 课题:第十三章 轮 系 13.1 概 述 13.2 定轴齿轮系传动比的计算 目的任务:了解轮系的类型、掌握定轴齿轮系传动比的计算 重点: 定轴齿轮系传动比的计算 难点:行星轮系结构 教学方法:多媒体(动画演示运动) 第十三章 轮 系 13.1 概 述 在机器中,常将一系列相互啮合的齿轮组成传动系统,以实现变速、分路传动、运动分解与合成等功用。这种由一系列齿轮组成的传动系统称为轮系。 13.1.1 轮系的类型 根据轮系在运转时各齿轮轴线的相对位置是否固定,可以分为两种类型。 1.定轴轮系 所有齿轮几何轴线的位置都是固定的轮系,称为定轴轮系。
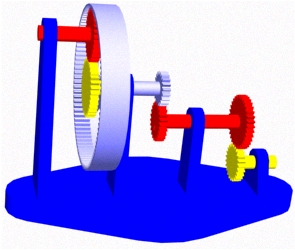
2.周转轮系 若轮系中至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为周转轮系。 如图所示的轮系中,齿轮2除绕自身轴线回转外,还随同构件H一起绕齿轮1的固定几何轴线回转,该轮系即为周转轮系。 13.1.2 轮系传动比概念 所谓轮系的传动比,是指该轮系中首轮的角速度(或转速)与末轮的角速度(或转速)之比,用i表示。 设 1 为轮系的首轮,K 为末轮,则该轮系的传动比为
轮系的传动比计算,包括计算其传动比的大小和确定输出轴的转向两个内容。 13.2 定轴轮系传动比计算 所有齿轮几何轴线的位置都是固定的轮系,称为定轴轮系。 轮系的传动比,是指该轮系中首、末两轮角速度(转速)的比值。
推广: 设首轮A的转速为nA,末轮K的转速为nK,m为圆柱齿轮外啮合的对数,则平面定轴轮系的传动比可写为:
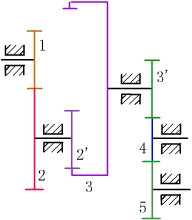
箭头法判断方向:
例 图示的轮系中,已知各齿轮的齿数Z1=20, Z2=40, Z'2=15, Z3=60, Z'3=18, Z4=18, Z7=20, 齿轮7的模数m=3mm, 蜗杆头数为1(左旋),蜗轮齿数Z6=40。齿轮1为主动轮,转向如图所示,转速n1=100r/min,试求齿条8的速度和移动方向。
|