|
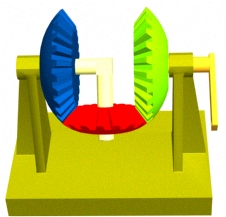
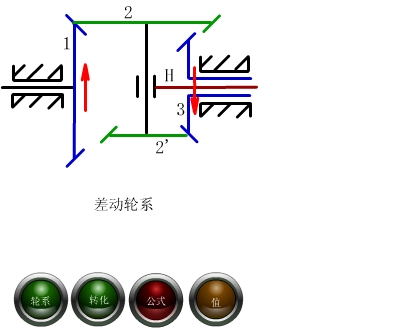
第三十九讲 下一讲 学时:2学时 课题:13.3 周转轮系传动比计算 目的任务:掌握周转轮系传动比计算 重点: 周转轮系传动比计算 难点:周转轮系传动比计算方法 教学方法:多媒体(动画演示运动、结构) 13.3 周转轮系传动比计算 13.2.1 周转轮系的组成 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为周转轮系。如图所示的轮系中,齿轮2除绕自身轴线回转外,还随同构件H一起绕齿轮1的固定几何轴线回转,该轮系即为行星轮系。齿轮2称为行星轮,H称为行星架或系杆,齿轮1、3称为太阳轮。 通常将具有一个自由度的周转轮系称为行星轮系; 将具有两个自由度的行星轮系称为差动轮系。 13.3.2 周转轮系的传动比计算 不能直接用定轴轮系传动比的公式计算行星轮系地传动比。可应用转化轮系法。 根据相对运动原理,假想对整个行星轮系加上一个与nH大小相等而方向相反的公共转速-nH, 则行星架被固定,而原构件之间的相对运动关系保持不变。 这样,原来的行星轮系就变成了假想的定轴轮系。 这个经过一定条件转化得到的假想定轴轮系,称为原行星轮系的转化轮系。
利用定轴轮系传动比的计算方法,可列出转化轮系中任意两个齿轮的传动比。 1,3轮的传动比为: 一般地,nG和nK为行星轮系中任意两个齿轮G和K的转速,
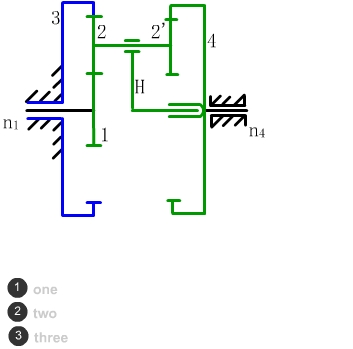
在使用上式时应特别注意: (1)公式只适用于圆柱齿轮组成的行星轮系。 对于由圆锥齿轮组成的行星轮系,当两太阳轮和行星架的轴线互相平行时,仍可用转化轮系法来建立转速关系式,但正、负号应按画箭头的方法来确定。并且,不能应用转化机构法列出包括行星轮在内的转速关系。 (2)将已知转速带入公式时,注意“+”、“-”号。 一方向代正,另一方向代负号。 求得的转速为正,说明与正方向一致,反而反之。 例13-2 周转轮系如图所示。已知Z1=15,Z2=25,Z3=20,Z4=60,n1=200r/min,n4=50r/min,且两太阳轮1、4转向相反。试求行星架转速nH及行星轮转速n3。 例13-3 图示是由圆锥齿轮组成的行星轮系。已知Z1=60,Z2=40,Z'2=Z3=20,n1=n3=120r/min。 设中心轮1、3的转向相反,试求nH的大小与方向。
的转速n1=1450r/min。试求输出轴转速n4的大小与方向。
|