|
第二十一讲 下一讲 学时:2学时 课题: 第三篇 常用机构 第八章 平面机构的运动简图 目的任务:理解平面机构、运动副、自由度等基本概念 重点:运动副、自由度等基本概念 难点:运动副 教学方法:多媒体 作业: 第八章 平面机构的运动简图 构件(Member):运动的单元。 机构(Mechanism)是由构件组成的,各构件之间具有确定的相对运动。 平面机构(Planar Mechanism)——所有构件都在同一平面或相互平行的平面内运动的机构。 8.1 平面运动副8.1.1 运动副(Kinematic Pair)的概念 1. 构件的自由度(Degree of Freedom) 构件的自由度——构件所具有的独立运动的数目。 一个作平面运动的自由构件有三个自由度。
2. 运动副 运动副——两构件直接接触而又能产生一定形式的相对运动的联接。
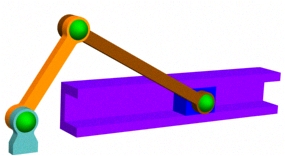
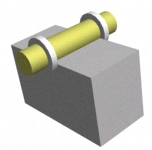
8.1.2 运动副的类型及其特点(Kinematic Pair Classification) 平面机构中,由于运动副将各构件的运动限制在同一平面或相互平行的平面内,故这种运动副也称为平面运动副。 根据构件间接触形式的不同,平面运动副可分为低副和高副。 1. 低副 低副——两构件通过面接触组成的运动副。 根据两构件间相对运动形式的不同,常见的平面低副有转动副和移动副两种。 ⑴转动副 转动副——两构件间只能产生相对转动的运动副。又称回转副或铰链。
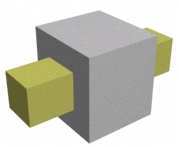
活动铰链(中间铰链) ⑵ 移动副 移动副——两构件间只能产生相对移动的运动副。
2. 高副 两构件通过点或线接触组成的运动副称为高副。
8.2 平面机构的运动简图 8.2.1 平面机构运动简图的概念 机构运动简图的绘制(Drawing Kinematic Scheme of Mechanism) 机构是由若干构件通过若干运动副组合在一起的。在研究机构运动时,为了便于分析,常常瞥开它们因强度等原因形成的复杂外形及具体构造,仅用简单的符号和线条表示,并按一定的比例定出各运动副及构件的位置,这种简明表示机构各构件之间相对运动关系的图形称为机构运动简图。 8.2.2 构件的分类及带有运动副元素的构件的图示 1.构件的分类 机构中的构件按其运动性质可分为三类: (1) 机架 机架是机构中视作固定不动的构件,它用来支承其它可动构件。例如各种机床的床身是机架,它支承着轴、齿轮等活动构件。在机构简图中,将机架打上斜线表示。 (2) 原动件 已给定运动规律的活动构件,即直接接受能源或最先接受能源作用有驱动力或力矩的构件。例如柴油机中的活塞。它的运动是外界输入的,因此又称为输入构件。在机构简图中,将原动件标上箭头表示。 (3) 从动件 机构中随着原动件的运动而运动的其他活动构件。如柴油机中的连杆、曲轴、齿轮等都是从动件。当从动件输出运动或实现机构的功能时,便称其为执行件。 2.带有运动副元素的构件的图示 运动副以及带有运动副元素的构件的画法见表。 机构运动简图常用符号(摘自GB4460-85)
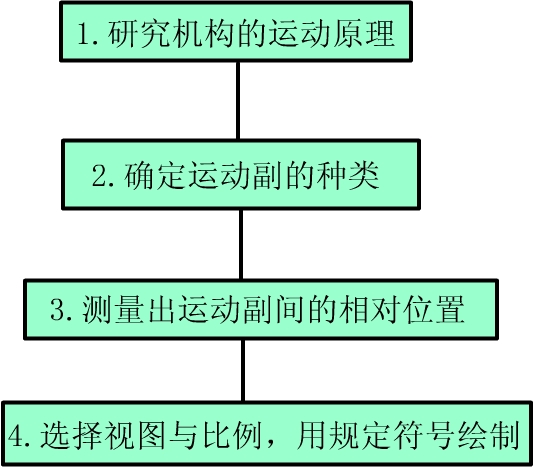
8.2.3 平面机构运动简图的绘制
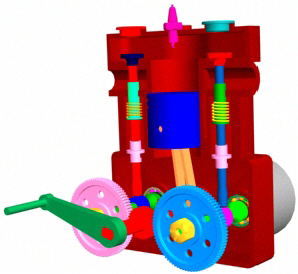
试绘制内燃机的机构运动简图
|

{kind=link}